四路底盘控制板
danger
本文还未完成。
四路电机驱动
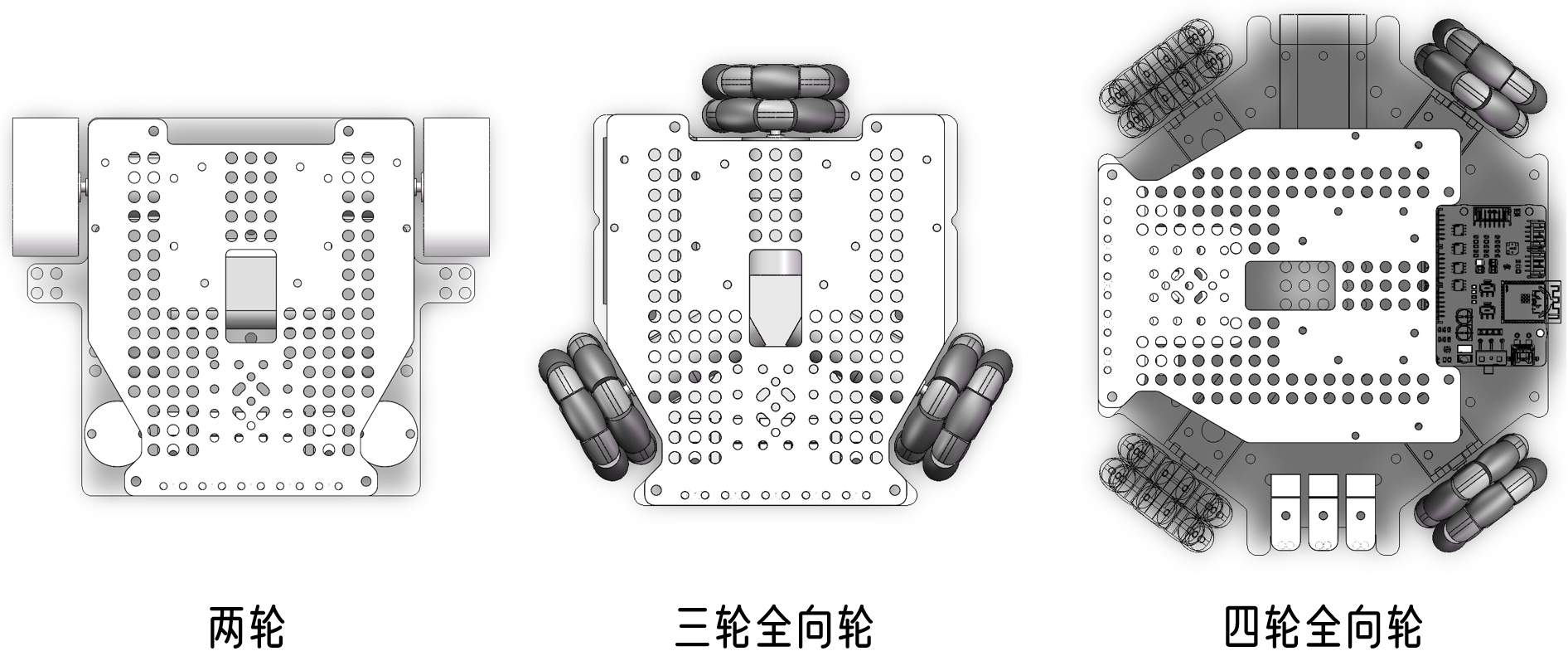
基于ESP32S3,通过I2C,可实现轮式机器人底盘高精度的运动控制,支持两轮轮式底盘、双输出轴轮式底盘、三轮全向轮底盘、四轮全向轮底盘、麦克纳姆轮底盘。
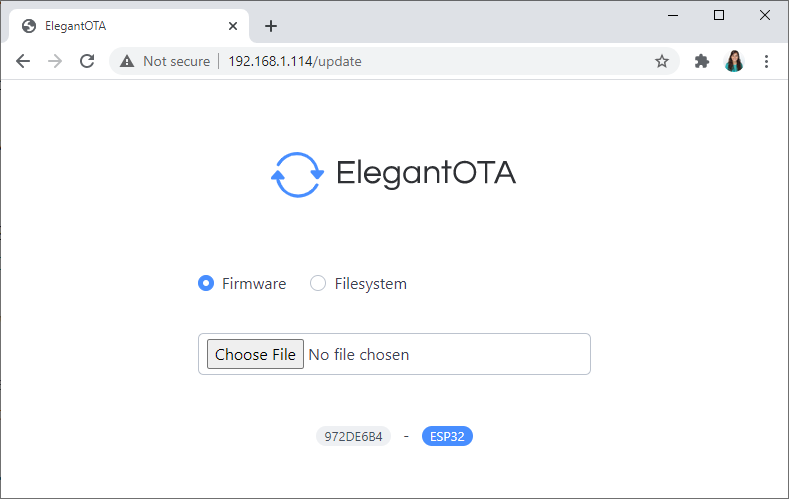
支持远程OTA,可远程实时查看板载传感器信息(IMU、电池、电流等),支持C++/MicroPython/Python/积木式编程(Mixly),实现各个年龄段高性能运动底盘的控制。
Arduino/ESP32
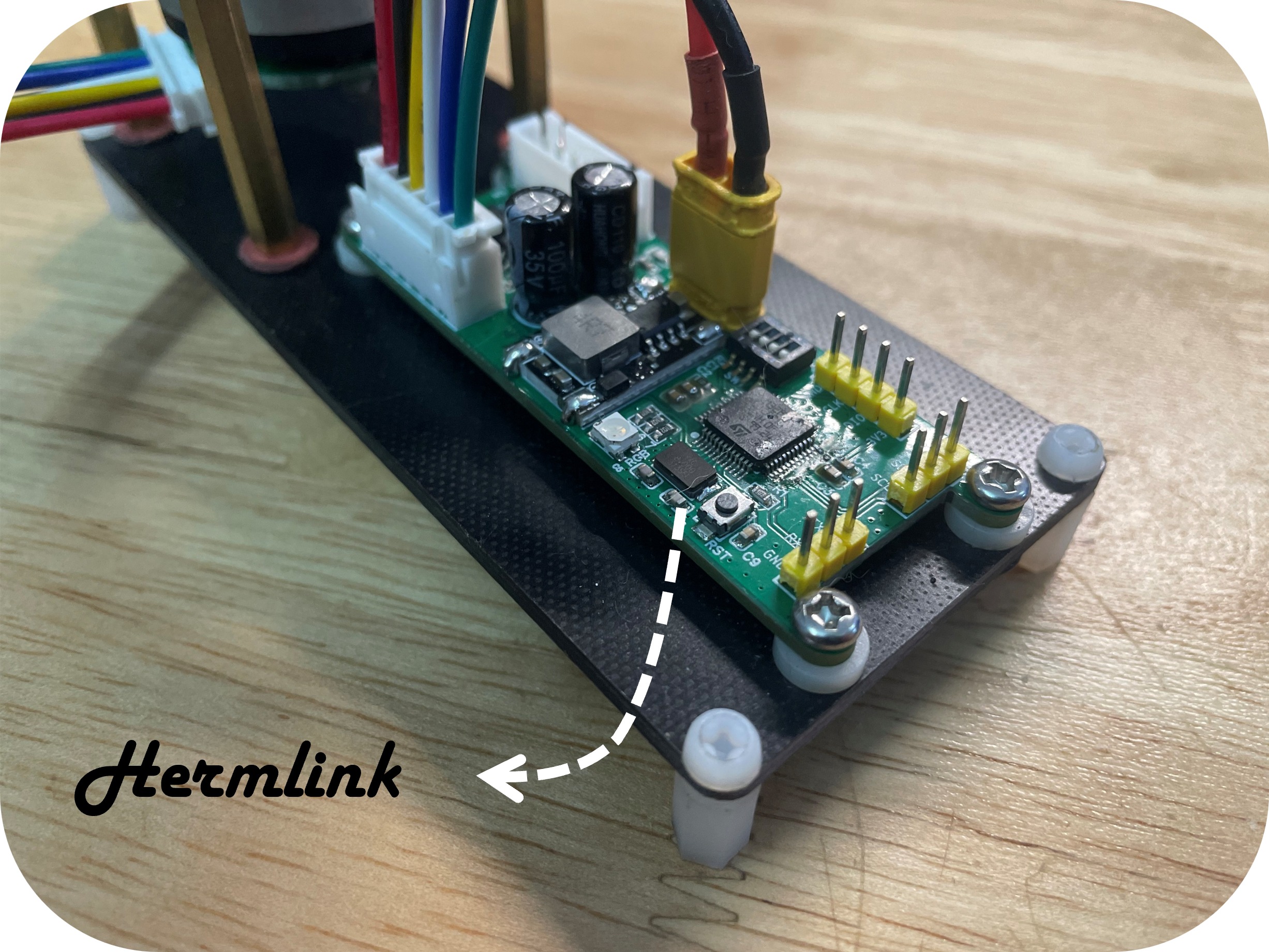
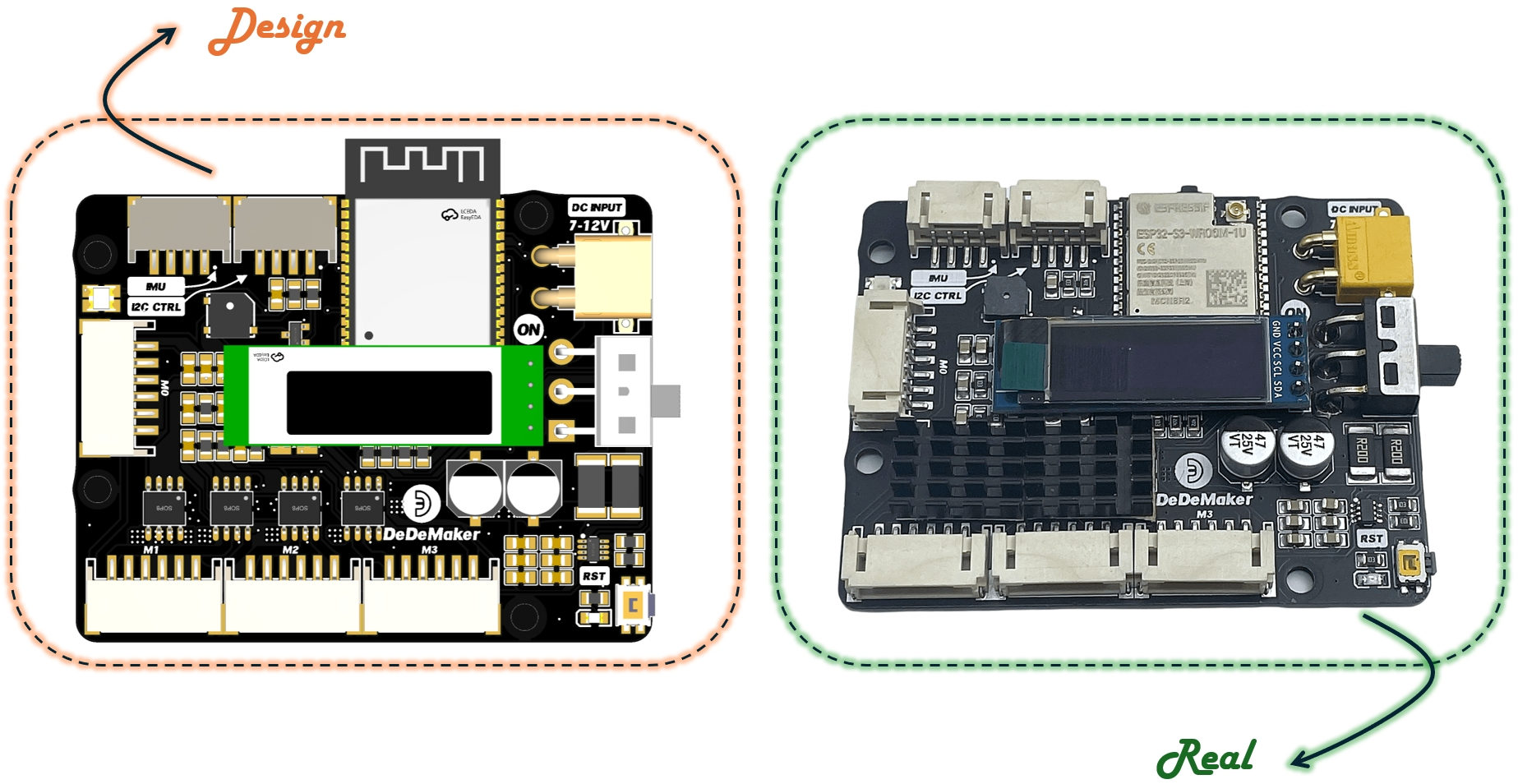
板子接口如下:
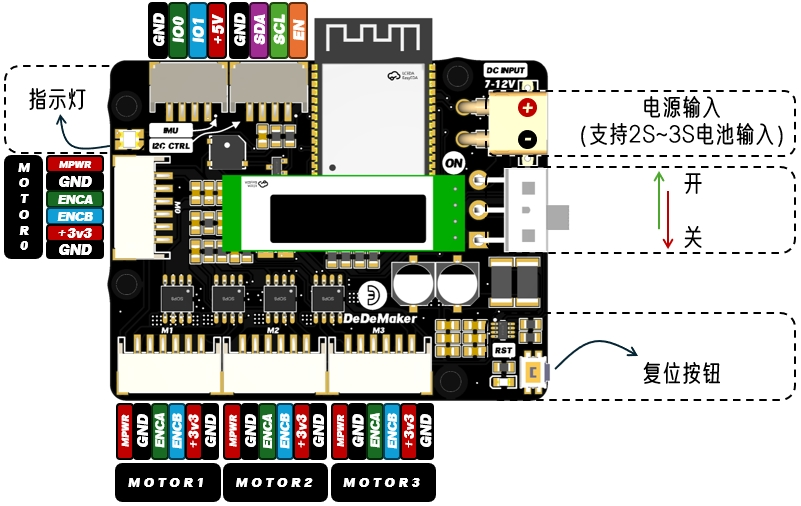
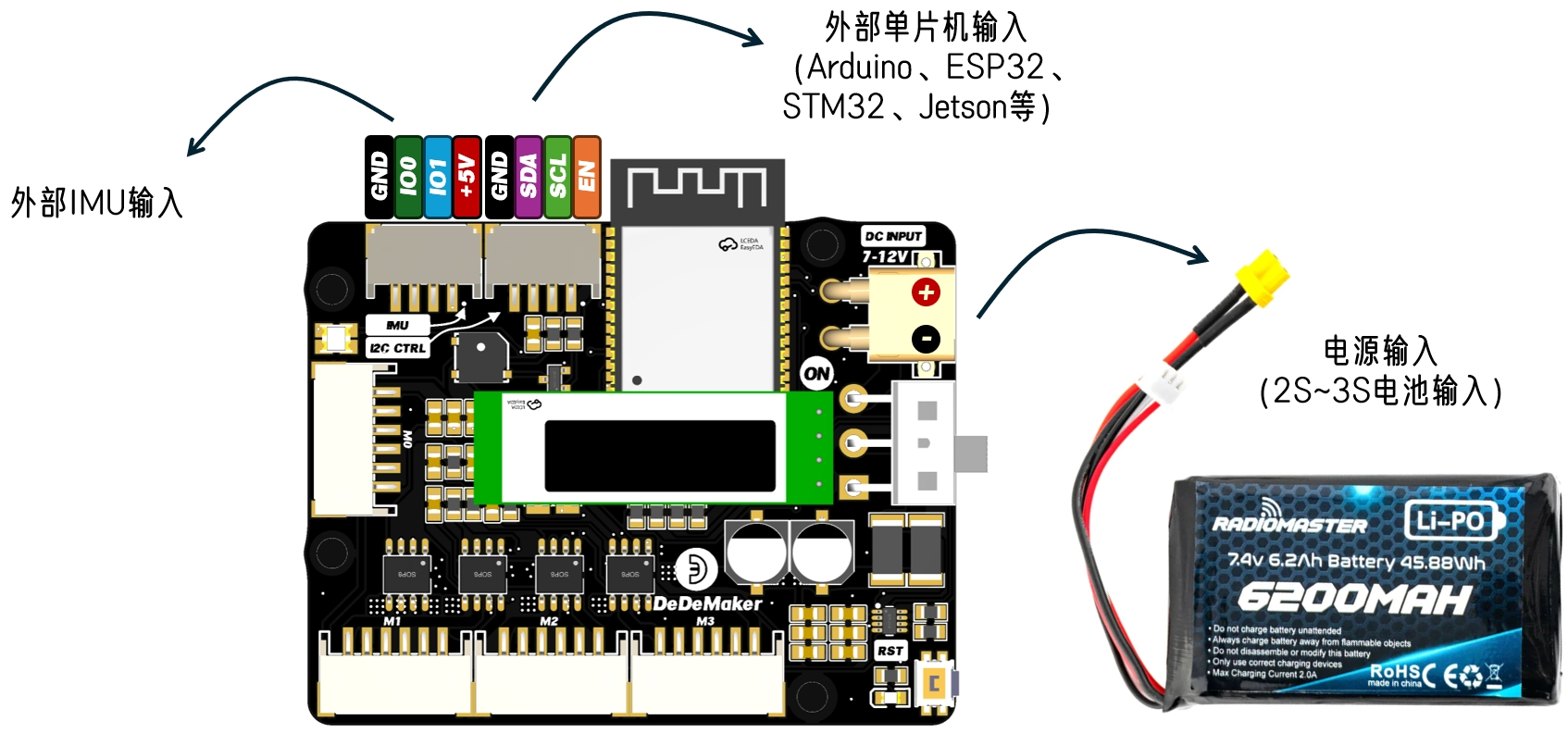
需要连接的接口为其中的电源XT30接口、I2C控制接口、和IMU陀螺仪接口(可选):
导入Arduino库:点击这里下载DeDeEncCar_V1_0.zip
可使用的接口如下:
0、应用层
1、用多少的速度循迹多少距离
K210/MicroPython
STM32
树莓派/Jetson/Python
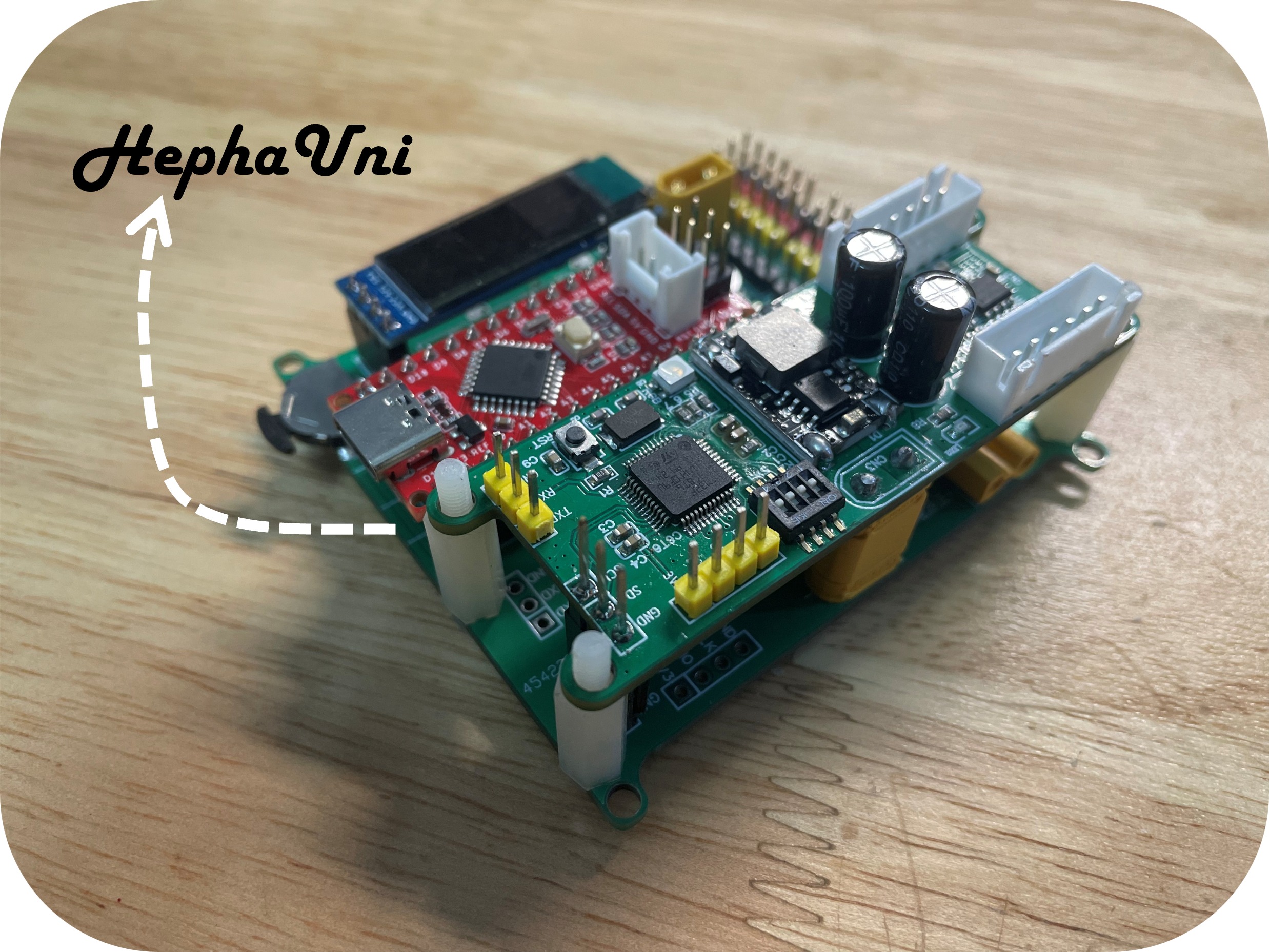
对应拓展板(UNO)